DEM of Difference (DoD) workflow to quantify river corridor elevation change between two
LiDAR-derived rasters at the Villerest site — mapping thresholded erosion and deposition
zones and computing area and volume statistics from a 1 m² pixel grid.
Python · rasterioEPSG:2154 · 1 m gridDoD = B − AThreshold T = 0.10 mLiDAR DEM · QGIS
River corridors are dynamic environments — the bed and banks erode and deposit material over
time, driven by floods, sediment supply, and channel adjustment. DEM of Difference (DoD)
is the standard geomorphological technique to detect and quantify these changes from repeat
LiDAR surveys: subtract an older DEM from a more recent one, pixel by pixel.
This project automates the full DoD workflow in Python using rasterio — from
reading aligned GeoTIFF rasters through thresholding, classification, area/volume computation,
and QA/QC figures — applied to the Villerest river corridor on a 1 m grid
in the French national coordinate system (EPSG:2154).
Methodology
Analysis pipeline
QGIS
PreprocessingDigitised river centreline → corridor buffer → clipped both DEMs → resampled DEM B to match DEM A on a 1 m grid (same CRS, extent, transform) → NoData standardised to −9999.
01
Grid validationPython asserts CRS match, pixel transform match, and shape match before any computation — ensures DoD is spatially meaningful.
02
DEM of DifferenceDoD computed per pixel: DoD = B − A. Positive = deposition (surface gained elevation). Negative = erosion (surface lost elevation).
03
ThresholdingUniform minimum detection threshold T = 0.10 m applied. Changes below ±T are classified as stable to avoid noise. Classification raster produced: −1 (erosion) / 0 (stable) / +1 (deposition).
04
Area & Volume statisticsPixel area = 1 m². Area = pixel count × 1 m². Volume = Σ(DoD × 1 m²) over classified pixels. Erosion volume reported as signed and as magnitude.
05
QA/QC & exportDoD histogram, DoD map, and erosion/deposition classification map generated and saved. Statistics exported to CSV.
DoD = B − A ← per pixel (both DEMs on same 1 m grid, EPSG:2154)
Erosion if DoD ≤ −0.10 m
Deposition if DoD ≥ +0.10 m
Stable otherwise
Volume = Σ(DoD × Apix) ← A_pix = 1 m²
Results
Key statistics — threshold T = 0.10 m
All statistics computed from outputs/tables/dod_erosion_deposition_stats.csv. Valid corridor area derived from valid (non-NoData) pixels.
Valid corridor area
1,895,198 m²
~189.5 ha of analysed corridor
DoD range
−7.03 → +9.00 m
Mean DoD: +0.172 m (net deposition)
Erosion area
105,311 m²
~5.6% of valid corridor
Deposition area
1,191,342 m²
~62.9% of valid corridor
Erosion volume
−46,588 m³
Magnitude: 46,587.65 m³
Deposition volume
+347,429 m³
347,429.08 m³
Net volume
+300,841 m³
Deposition − Erosion: strong net gain
QA/QC Figures
Output maps & histogram
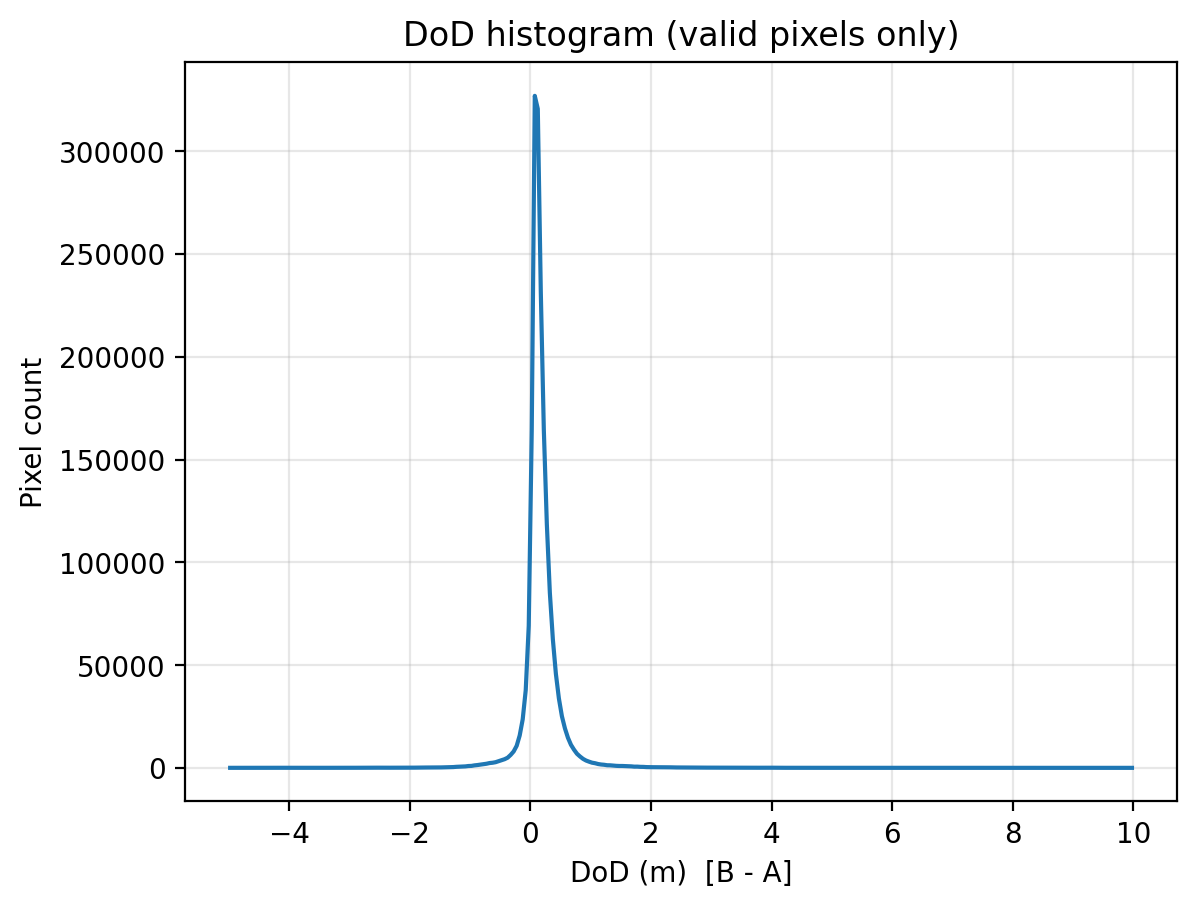
Figure 1 — DoD Histogram. Distribution of per-pixel elevation change (DoD = B − A) across
the Villerest corridor. The right-skewed distribution confirms net deposition dominates. Vertical
dashed lines mark the ±0.10 m threshold. Pixels between the lines are classified as stable.
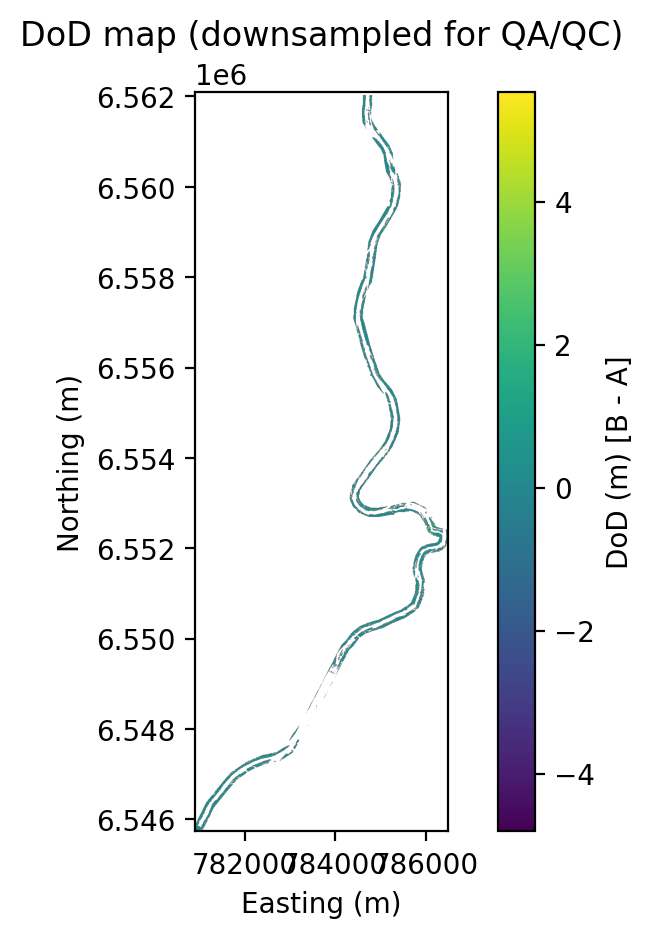
Figure 2 — DoD Map. Spatial distribution of elevation change (m) across the river corridor.
Cool colours = erosion, warm colours = deposition. Produced at 1 m resolution, EPSG:2154.
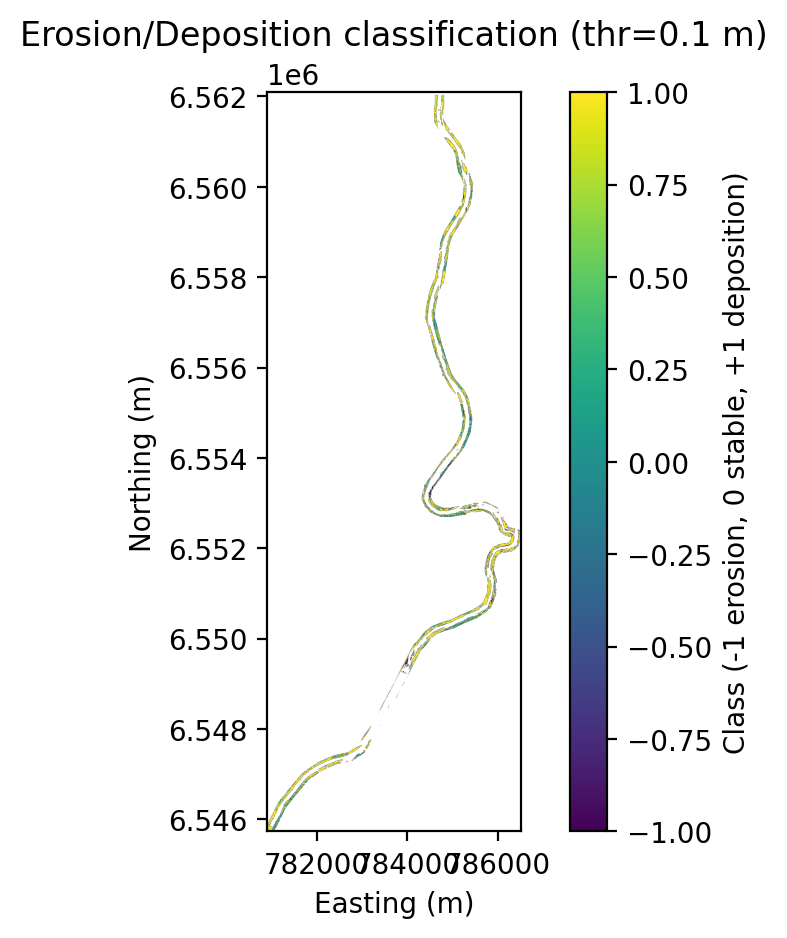
Figure 3 — Classification Map. Thresholded erosion (−1, red) / stable (0, grey) /
deposition (+1, blue) classification at T = 0.10 m. Deposition dominates the corridor, concentrated
on inner bends and the channel bed.
Technical Details
Stack & repository structure
Python 3rasterionumpypandasmatplotlibDEM of DifferenceGeomorphologyErosion MappingVolume StatisticsQGIS PreprocessingEPSG:2154LiDAR DEM · 1 m grid
riverbank-change-detection/
├── tools/
│ ├── dod_workflow.py ← main script (317 lines): DoD, threshold, stats, plots
│ └── verify_qgis_dod.py ← optional: verify against QGIS-produced DoD
├── outputs/
│ ├── figures/
│ │ ├── dod_histogram.png
│ │ ├── dod_map.png
│ │ └── class_map.png
│ └── tables/
│ └── dod_erosion_deposition_stats.csv
├── report/
│ └── report.md ← full methodology & results report
├── Inputs/ ← GeoTIFFs placed here (git-ignored, large files)
├── dod_workflow.py ← also at root level for convenience
└── README.md
⚠ Limitations. The uniform minimum detection threshold (T = 0.10 m) is a simplified
approach. A more rigorous analysis would incorporate spatially varying uncertainty (e.g., from survey
point density or ground control point error) to produce a propagated error surface. Results are also
sensitive to the quality of DEM alignment during QGIS preprocessing.